With further progress on the Head design I wanted to update the URDF.
The updates would capture the refined details around:
- the head design – updates to new geometry, masses, and axes positions
- the visual meshes – being reflective of the real CAD versus the rough blocks in the previous version
The main speed bumps along the way for this was learning that the package needed to be rebuilt after each update, how the mesh positions are defined, and how the mesh type referenced can crash IsaacSim when being imported (it did not like the DAE files but the stls were fine).
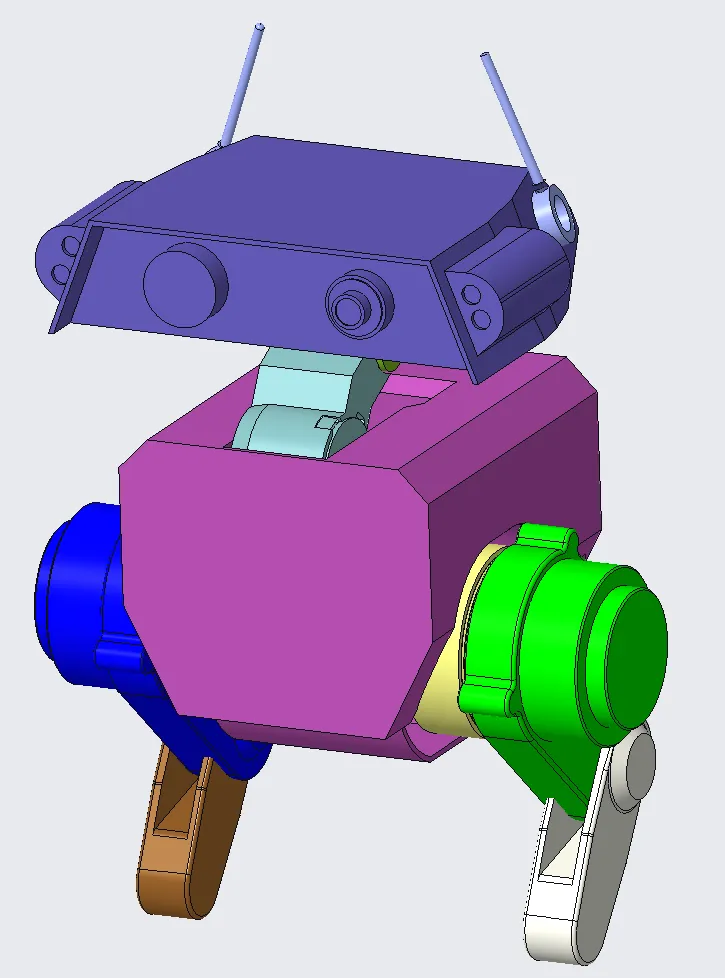
Robot Model within Creo
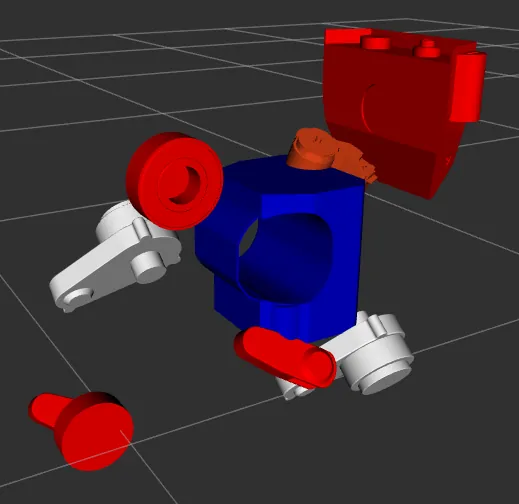
Initial mesh import with wrong positions
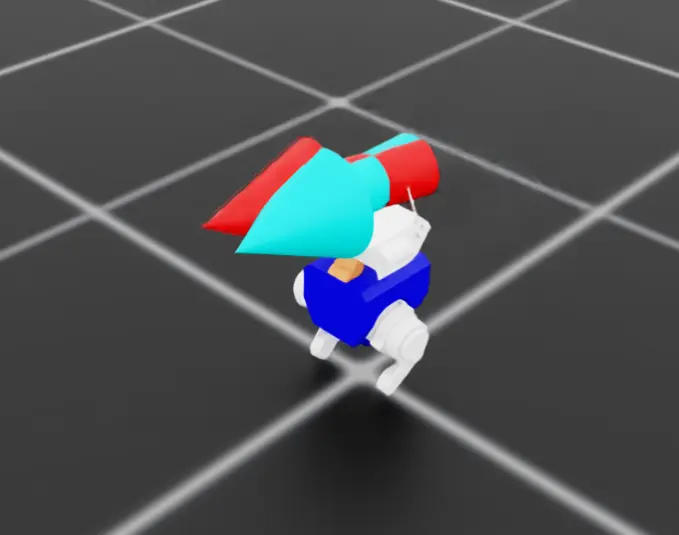
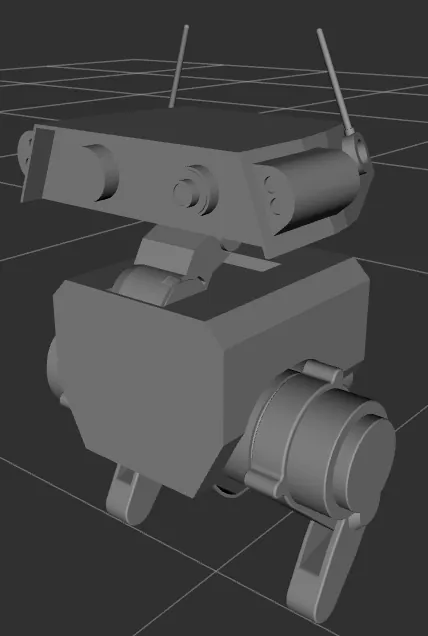
IsaacSim
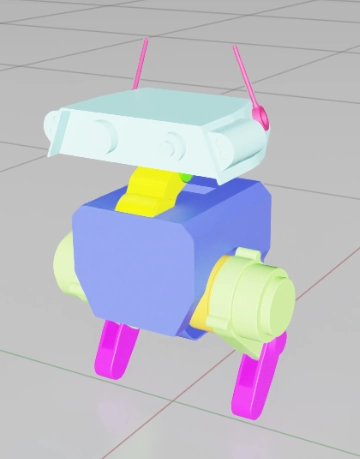
IsaacSim with Colours
I want to use this model as a starting point to learn how to use IssacSim and IsaacLab.
As the robot design progresses, with cameras, and sensors etc. I want to feed this back into the system.
If I can get useful RL training software from IsaacSim and/or the various NVIDIA platforms I’ll definitely explore transferring this back to the robot.