I recently learnt about Isaac Lab/Isaac Sim and how it can be used for reinforcement learning. Reading more about this I also discovered URDFs (Unified Robot Description Format). I saw this as a good learning opportunity (and a way to procrastinate editing a youtube video).
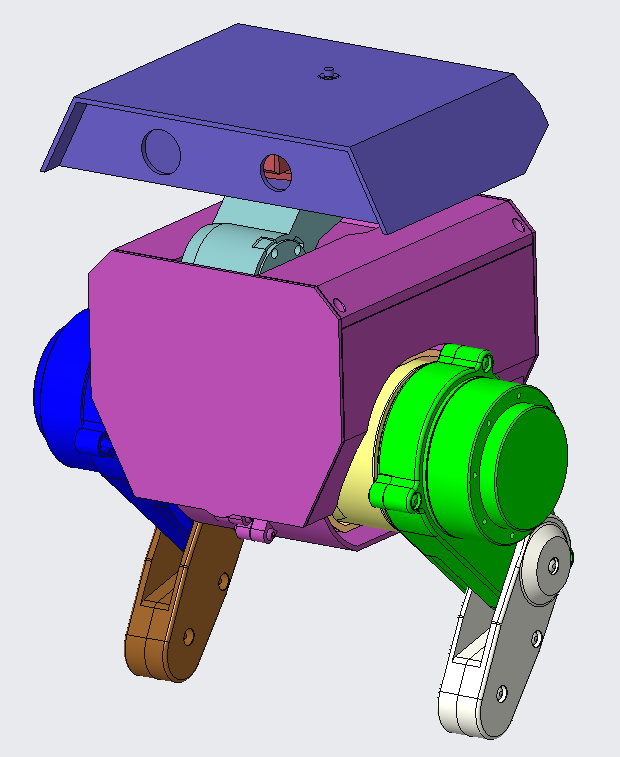
I built up a new CAD assembly, structured to match the URDF joints and links, and used this to determine the various relation and inertial values. As the head assembly is still largely undefined, the inertial properties will need to be updated with changes.
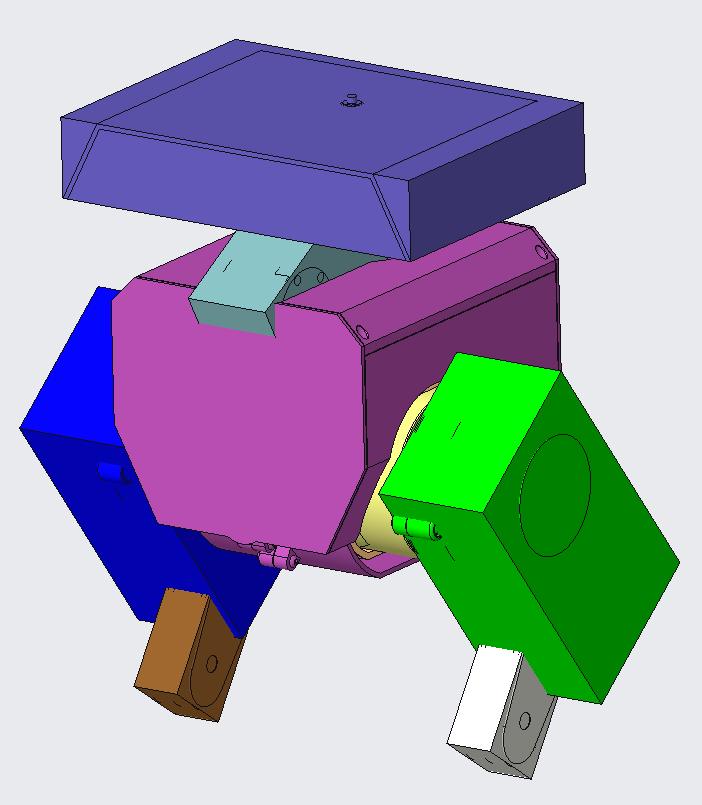
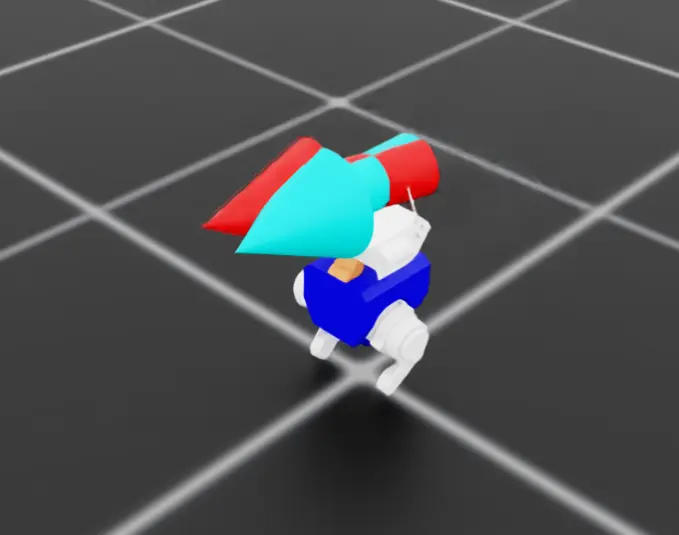
For the initial pass as I’ve not used ROS2 before, the various links are using crude blocks to represent their shape, as can be seen in the image below.
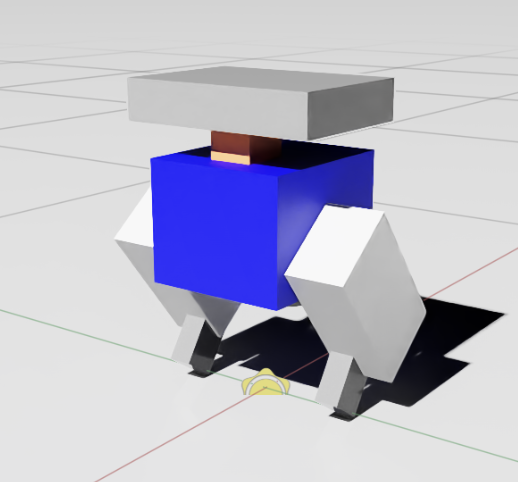
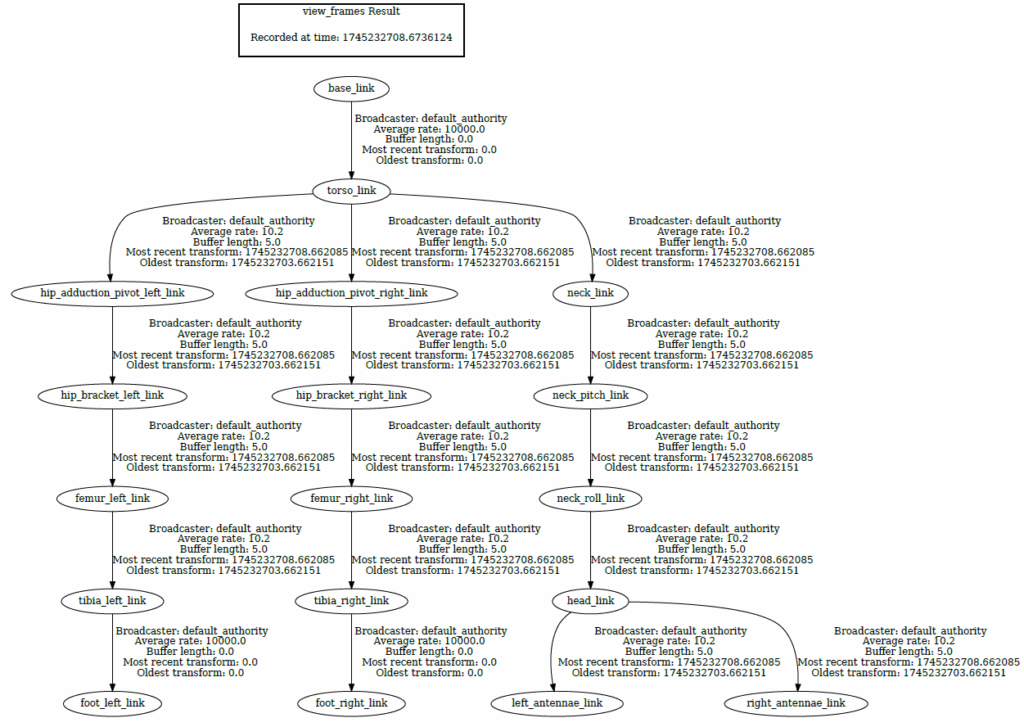
The structure all stems from the torso, out to left and right feet, and also through the neck to cosmetic antennae.
As the head design firms up, I expect to add further links and joints for items such as the eyes and and headlamp(s).
The next steps for this are:
- Implement more accurate geometry from CAD
- Learn how this can be run within Isaac Lab/Isaac Sim.