I’m going to start a series of posts on a small biped robot that I am currently building.
I want to build it as a platform to practice and develop engineering skills across mechanical, electronics, and software.
The robot design is inspired by the BD droids showcased earlier this year.
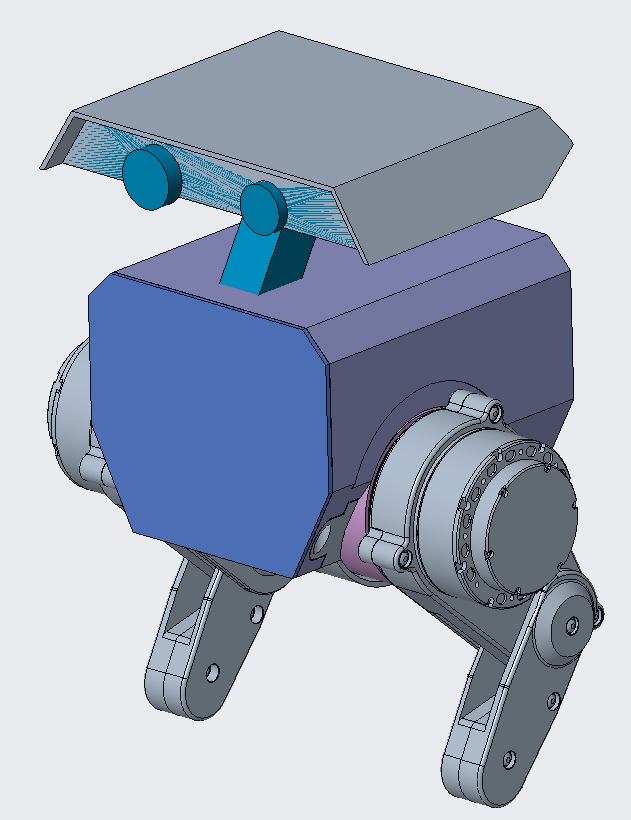
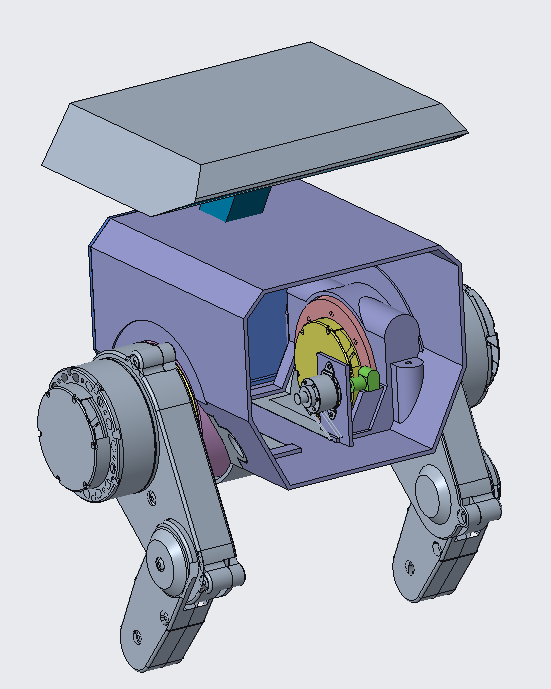
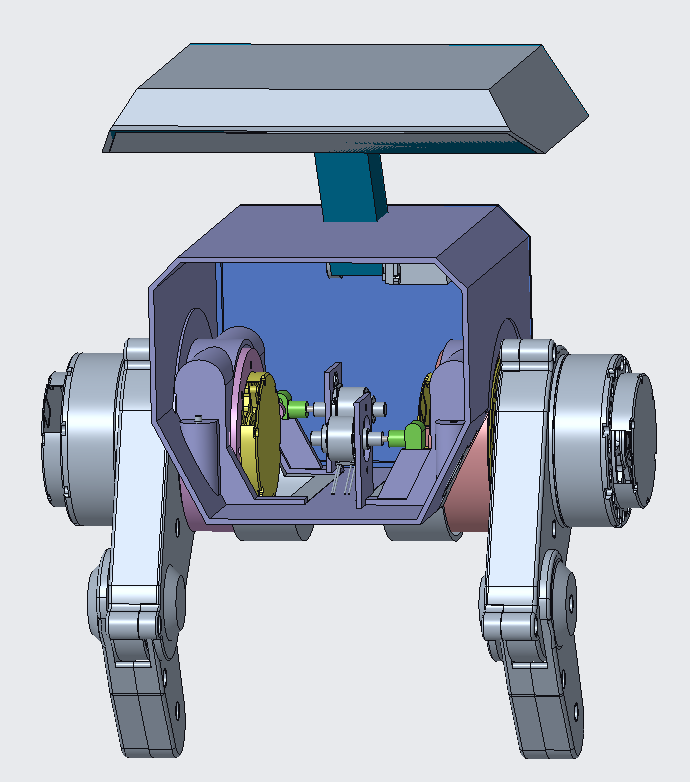
As of today the current robot design in CAD is below.
There is no real functional goal from the robot, I do want it to get to a minimum level of performance:
- Be able to sit and stand in a short time
- Be able to stably walk around on its legs
- Actuate its head, any additional actuators, or lights to mimic droid behaviour seen in common Sci-fi media.
In terms of development, I want to cover or include:
- My own motor drivers, with an FOC controller
- My own part design (3rd party motor design I can live with for now)
- Create dynamic models for the various pieces
- My own electronics and software
I’ll be creating some posts about the major stages getting to where I am now covering some points such as:
- The leg dynamic model
- Leg design and prototypes
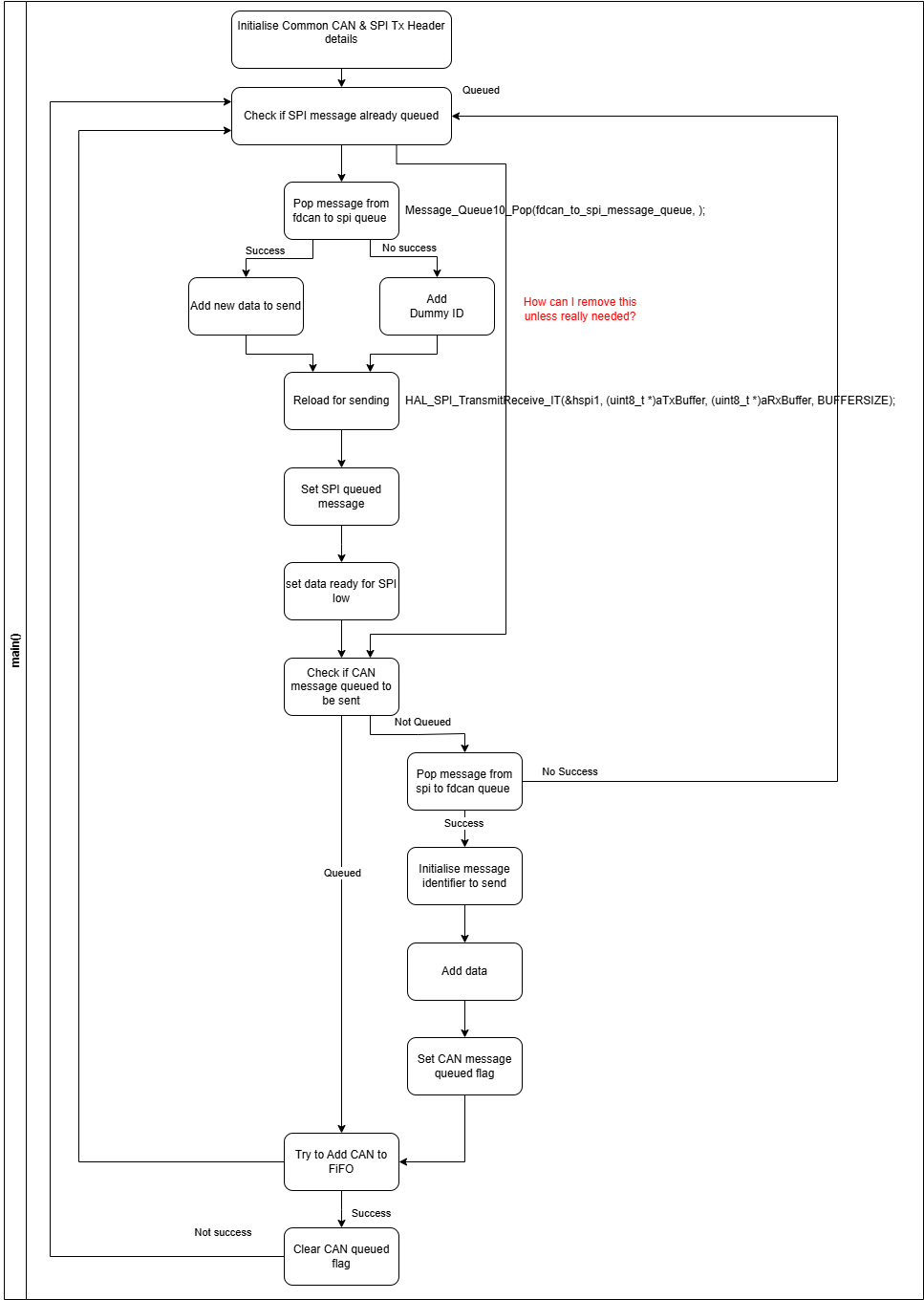
- Motor communication software development
- Torso initial design
From there I intend to post shorter more regularly with details on the areas I am working on.