One aspect that I have consistently been mulling over is “do I need active articulating feet?”.
This is a question that I don’t have near a concrete answer for, and don’t know that I can definitively answer.
Ignoring the philosophical aspect of “what is a foot?”, I think to get to something that helps point one way or the other needs some form of testing.
The counter to this is if I test an actively articulating foot versus a non-articulating foot, does one perform better because of the design or because of the presence/absence of the articulating foot? Again, I don’t expect to be able to answer this.
The plan to evaluate both is to generate a form with feet and start trialling it within IsaacLab to see how it performs. Likely not the perfect approach but with the CAD at a usable stage, the lift is more in the software side with simulations I can run when I’m not needing heavy computer use.
Changes in the Design
I aimed to minimise the changes with a quick implementation for running in sim.
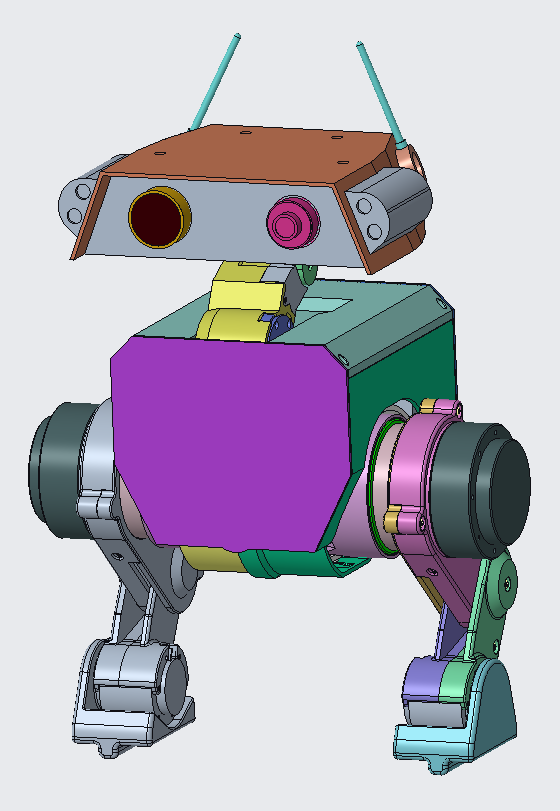
All the changes are limited to the tibia down.
- The tibia inner and outer are modified to house a GIM4310-36 motor
- The ankle actuators are GIM4310-36, common to those in the hip and lower neck.
I didn’t want something large, but will need to analyse the sims to see if speed or torque is being limited or not needed. - An additional foot piece, mounting direct to the motor
This does add height, but I would say it’s an insignificant amount.
The foot is on a narrow strip running front to back, I think this will help with walking, allowing a more natural rock side to side without adding another active axis of rotation at the ankles.
I do think the single foot piece is unrealistic for what a physical implementation would be, I expect something on the inside clamping around the motor with a bearing will likely be needed. I don’t want to dive into this just for the simulations.
Getting Simulation Ready
Thankfully I was able to leverage the existing URDF and meshes to turn the new design from CAD to USD.
I have an excel document that can take the transforms from Creo and put them into the form I need for the URDF.
Then, it’s modifying the tibia and foot links, the ankle joint and it’s ready for import into IsaacSim.
I was quite surprised that when I hit play in Isaac Sim it stayed up balancing on its feet, guess I got lucky with CoG placement and default leg and foot positions. I did verify it wasn’t stuck in place by moving some joints which lead it to fall over.
The video shows a side-by-side of the footed and non-footed versions in IsaacSim with no control.
Next Steps
I’m going to take this model and refine the training model from that I had previously worked on.
I think most of the changes to the training set up will apply to both footed and non-footed versions which will help better understand how they perform and also not double the amount of work needed.