Image from SteadyWin.
Initially, I was tempted to design and build a custom motor. Somewhat inspired from Ben Katz’s Mini Cheetah and Josh Pieper’s Moteus designs.
Thankfully, I realised I should probably leave that to a later date and get something off the shelf to start building around.
Motor Suppliers
I started searching for motor suppliers that others had used and what I have encountered through my professional life.
These were pulled together into an excel document to help compare specs and narrow my focus.
Unfortunately, at the time I was relying on iCloud to sync between my devices which, for me, didn’t play nicely with windows. This lead to losing about a month of updates.
Some of the motor suppliers considered were:
- Turnigy
- Xoar
- Unmanned Tech
- T-Motor
- MJBots
- SteadyWin
Steadywin‘s design with the integrated planetary gearbox was based on Ben’s MIT design. There were several others that were similar but Steadywin’s were significantly cheaper (which usually has some unwritten trade-offs). If you have a recommended or alternate supplier then please let me know in the comments.
Steadywin have been somewhat helpful through Aliexpress chat, they weren’t able to provide sufficient info to use RS485 (even saying it’s not an option). Their documentation for use via CAN has been sufficient to get the motors up and running but is inaccurate in some places.
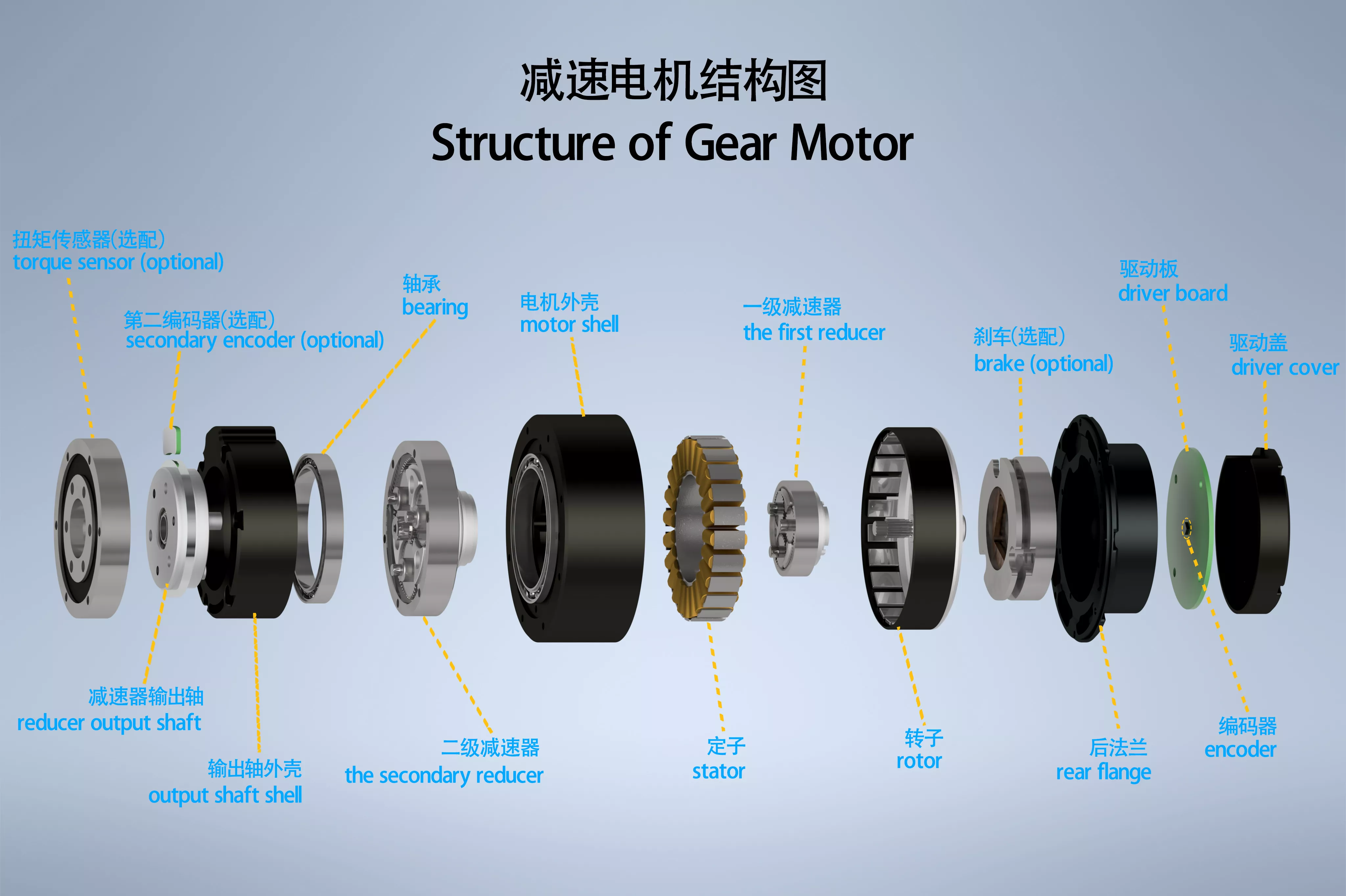
A nice exploded view of the motor can be found below, from their website, here.
Motor Selection
I took their range of motors in the planetary reduction range, and the values from the dynamic model.
For a slow squat to stand movement (~8s) I calculated ~14Nm on the hip motor, this was prior to realising some of my calculation mistakes.
For the desired squat to stand movement the hip torque was ~60Nm, this is significantly lower after my corrections.
Speeds needed were also slow. Can see more details on the dynamic model post.
Motors were filtered between the following:
- Gearbox ratio: ≤ 36
These were a lot deeper - Stall Torque (Nm): ≥ 15
- Stall Current (A): ≤ 25
This was largely based on my ability to source current greater than 30A without acquiring new power supply equipment. - Max Input Voltage (V): ≥ 36
Initially aiming at 24V Nominal but wanted a decent upper buffer in case I needed to increase this - Diameter (mm): ≤ 100
Didn’t want the motor to overwhelm the leg too much.
This left four:
- GIM8108-6
- GIM8108-8
- GIM8108-9
- GIM8115-9
Something seemed off with the specs of the GIM8108-8 versus the others so excluded that.
Between the 8108 and 8115, the small increase in depth (7mm) seemed a good exchange for the jump in stall torque (from 10+A).
This lead to choosing the GIM8115-9.
Motor Driver
I want to design my own motor driver as a way to learn more about motor control (specifically FOC), practice my power electronic and embedded design, and also embedded firmware.
This is happening but as a “parallel path” to the main robot design (there’s only one of me so not truly parallel).
To enable robot development I decided to buy some off the shelf drivers.
Steadywin provided two options for the GIM8115-9 motor:
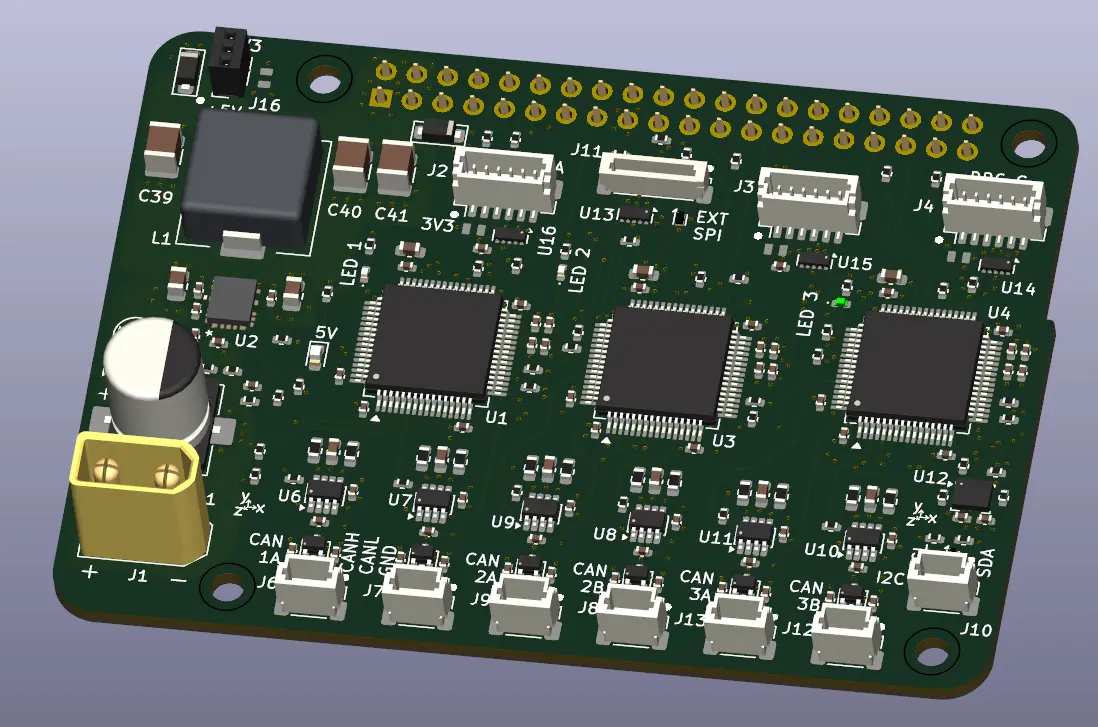
- SDC103 – their in house design running on there own software
- SDC303 – their version of the MIT design
The two main differences that I could see was increased cost for the SDC303 (~£16) and SDC103 had both CAN and RS485 versus only CAN on the SDC103.
I chose the SDC103.
Use Plan
For the initial order I wanted 3 motors and 2 drivers (now, I think I should have ordered 3 drivers).
Motor and driver #1 were to be used with the robot to design and build around with initial testing.
Motor and driver #2 were for similar to #1 but I also wanted to tear the design down for a full review and reconstruction in CAD (mechanical and electronics), and use as a design reference.
Motor #3 was for development of my own motor driver.
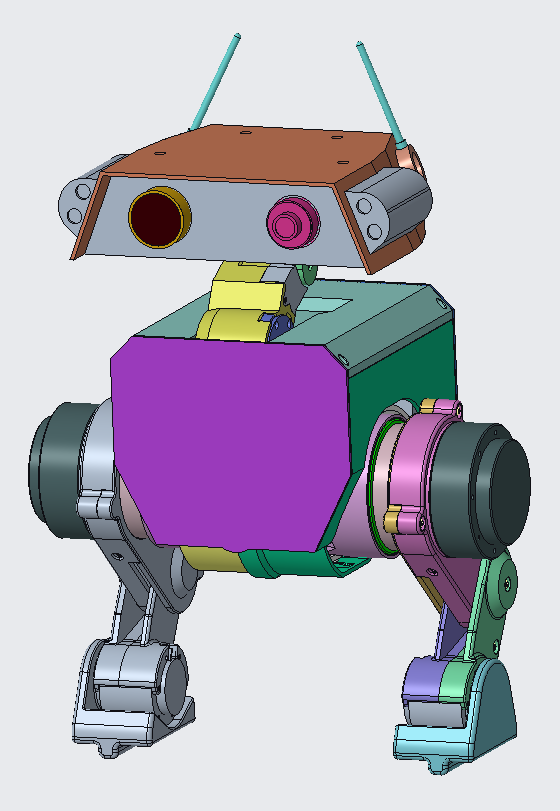
Currently motors #1 and #2 are installed and being used in my initial leg prototype and not yet torn down for review.
I plan to add a post and youtube video of this when this happens.
Final Note
Would I choose these motors if I was to do this again, probably yes.
I may have opted for the other driver and possibly a smaller version but they’re good enough for me to get going with, which is what I was aiming for.